
TM 5-3805-290-10
DESCRIPTION AND USE OF OPERATOR CONTROLS AND INDICATORS - CONTINUED
0004 00
LOADER AND AUXILIARY HYDRAULIC CONTROLS - CONTINUED
0004 00
2.
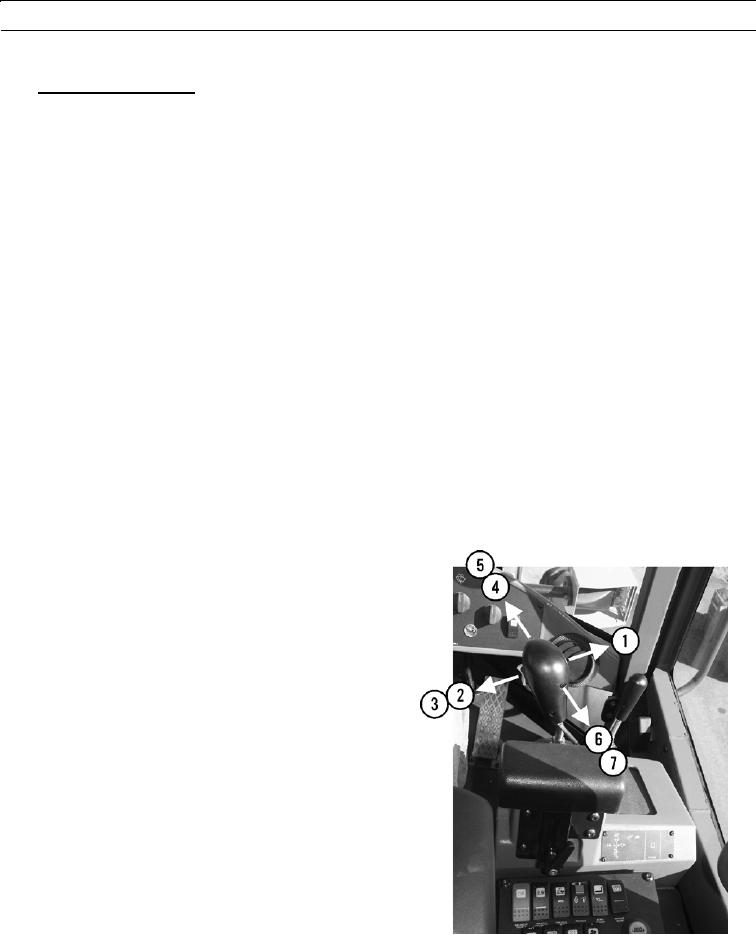
Loader Control Joystick.
a.
DUMP (1). Move joystick to the right to tilt loader arm (bucket or forks) forward. Release joystick to stop move-
ment. Joystick will return to HOLD position when released.
b.
TILT BACK (2). Move joystick the left to tilt loader arm backward, i.e., to "rack" the bucket or forks. Release
joystick to stop movement. Joystick will return to HOLD position when released.
c.
TILT KICKOUT (3). Move joystick all the way left into detented TILT KICKOUT position. Joystick will remain
in detent and loader arm will continue to tilt back, until loader arm reaches preset location for tilt (return to work/
return to dig) kickout. Then, joystick will return to center HOLD position.
d.
LOWER (4). Move joystick forward to lower loader arm. Release joystick to stop movement. Joystick will return
to HOLD position when released.
CAU T I ON
NEVER use RETURN TO CARRY position when loader arm is loaded. Machine damage may result.
e.
RETURN TO CARRY (5).
(1)
Move joystick all the way forward into detent. Loader arm will raise until it reaches proper height to carry
load.
(2)
Joystick will remain in RETURN TO CARRY until it is pulled out of detent, at which point it will return to
HOLD.
f.
RAISE (6). Move joystick back to raise loader
arm. Release joystick to stop movement. Joystick
will return to HOLD position when released.
g.
LIFT KICKOUT (7). When joystick is pulled
all the way back to detented LIFT KICKOUT
position, joystick will remain in detent and
loader arm will continue to rise until it reaches
lift kickout height. Then, joystick will return to
HOLD position.
h.
HOLD. Joystick will return to center HOLD
position when released. Loader arm will remain
in selected position.
427-B0103F
0004 00-25