
TM 5-3805-291-23-1
THEORY OF OPERATION - CONTINUED
0003 00
ELECTRO-HYDRAULIC SYSTEM - CONTINUED
7.
Electro-hydraulic Control.
a.
Joystick control combines three-function levers into one control. Joystick is equipped with a PWM sensor for lift,
tilt, and auxiliary functions. Arrows going from right to left describe lift functions. Arrows going up and down are
for tilt functions. Thumb lever controls auxiliary or third function. Joystick control has soft detents controlled by
software within implement ECM. As joystick control is moved into detent position, linkage will travel to prepro-
grammed kickout position. Joystick control should be released to automatically return to HOLD position. Linkage
movement will continue until kickout is reached. Any 6 degree movement of joystick control from HOLD position
will disable detent. Soft detents will not be activated if joystick control is held in detent position for more than one
second.
b.
Fine modulation switch allows operator to control amount of current sent to proportional valves solenoid. Fine
modulation mode enables a different joystick modulation map that provides less current during initial joystick
travel before current ramps up to full command value. Activating fine modulation will allow more accurate imple-
ment control.
c.
Hydraulic lockout switch is used to disable implement pilot system. When switch is in LOCKED position, hydrau-
lic lockout solenoid valve is de-energized. No pilot oil is allowed to flow through oil manifold pilot valve. When
switch is in UNLOCKED position, hydraulic lockout solenoid valve is energized. Pilot oil is allowed to flow
through oil manifold pilot valve.
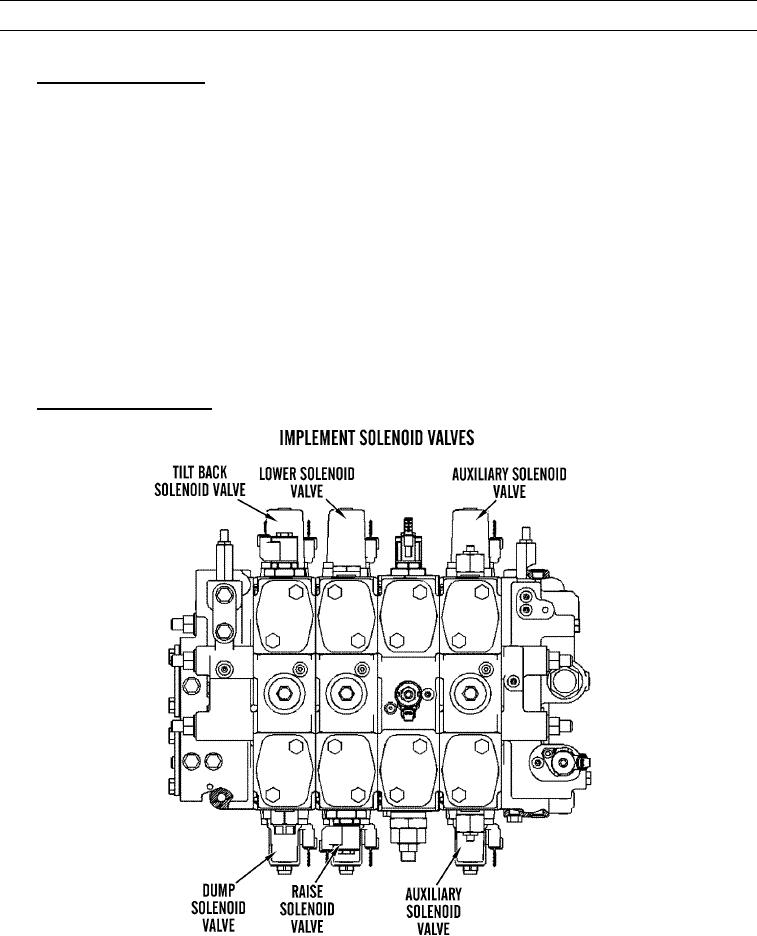
8.
Implement Solenoid Valves.
427-C1823
0003 00-155