
TM 5-3805-291-10
DESCRIPTION AND USE OF OPERATOR CONTROLS AND INDICATORS - CONTINUED
0004 00
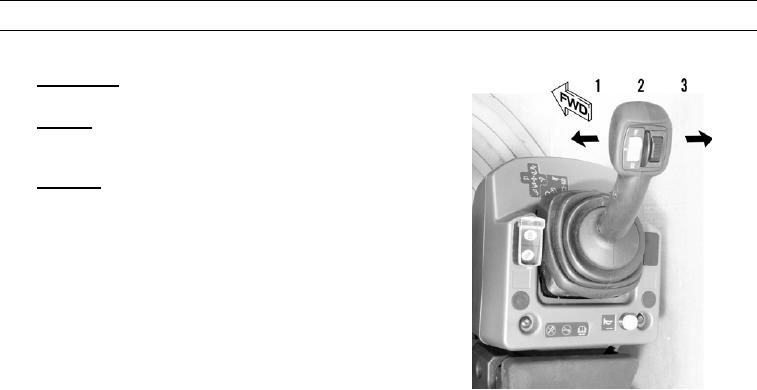
BUCKET CONTROL
0004 00
1.
Tilt Back (1). Move the joystick to the left in order to
tilt the bucket backward.
2.
Hold (2). When you release the joystick, the joystick
will return the HOLD position. The bucket will remain
in the selected position.
3.
Dump (3). Move the joystick to the right in order to
dump a load from the bucket.
427-C0043
N OT E
A machine with ride control may experience partial lowering of the lift arms when the joystick is held
in the DUMP position with the bucket against the bucket stops and the lift arms are fully raised. To
avoid partial lowering of the lift arms, return the joystick to the HOLD position.
The joystick control is detented in the full TILT BACK position. When the joystick is moved into the soft detent, the oper-
ator will feel an increased resistance from the joystick. Once in the detent, the joystick should be released in order to automat-
ically return to the HOLD position. The attachment will continue to tilt back until the attachment reaches the digging angle
that is preset by the tilt kickout. In order to manually override the detent, the joystick must be moved at least 6 degrees from
the HOLD position. The detent will not be activated if the joystick is held in the detent position for more than 1 second.
The joystick control is detented in the full DUMP position. When the joystick is moved into the soft detent, the operator
will feel an increased resistance from the joystick. Once in the detent, the joystick should be released in order to automatically
return to the HOLD position. The attachment will continue to dump until the attachment reaches the digging angle that is pre-
set by the tilt kickout. In order to manually override the detent, the joystick must be moved at least 6 degrees from the HOLD
position. The detent will not be activated if the joystick is held in the detent position for more than 1 second.